

A exploração de cavernas na Lua e em Marte representa um dos desafios mais intrigantes e promissores da astrobiologia e da engenharia espacial contemporânea. Essas formações geológicas, conhecidas como tubos de lava, são estruturas subterrâneas criadas por fluxos de lava que esculpem túneis ao longo de seu percurso. Na Lua e em Marte, esses tubos de lava oferecem não apenas um vislumbre das atividades vulcânicas passadas, mas também um refúgio potencial contra as condições extremas da superfície, como a radiação cósmica e as variações térmicas severas.
Em meio a esse cenário, surge o ReachBot, um robô inovador desenvolvido por uma equipe de pesquisadores da Universidade de Stanford. Este dispositivo robótico foi projetado especificamente para enfrentar os desafios únicos apresentados pelos ambientes subterrâneos de outros planetas. Com sua mecânica avançada e algoritmos sofisticados, o ReachBot promete revolucionar a maneira como exploramos essas áreas inóspitas e de difícil acesso.
A importância do estudo sobre o ReachBot transcende a mera curiosidade científica. A capacidade de explorar e mapear tubos de lava na Lua e em Marte pode abrir novas fronteiras para a ciência planetária e a exploração espacial. Essas cavernas não apenas preservam registros geológicos valiosos, mas também podem servir como abrigos naturais para futuras missões humanas, protegendo astronautas das condições adversas da superfície. Além disso, a exploração desses ambientes pode revelar pistas sobre a história geológica e potencial habitabilidade desses corpos celestes.
O recente estudo publicado na Science Robotics detalha os avanços no desenvolvimento do ReachBot e suas possíveis aplicações na exploração lunar e marciana. Liderado pelo Dr. Tony Chen, pós-doutorando no Laboratório de Microrrobótica de Harvard, a pesquisa investiga como o ReachBot pode superar os obstáculos apresentados por terrenos irregulares e confinados, como os encontrados em tubos de lava. Através de uma série de testes e melhorias prototípicas, o ReachBot demonstrou uma capacidade notável de manobrar e operar em ambientes que seriam inacessíveis para robôs convencionais.
Com a missão Artemis da NASA planejando levar humanos de volta à Lua, incluindo a primeira mulher e a primeira pessoa de cor a pisar em seu solo, a relevância do ReachBot se torna ainda mais evidente. Este robô não só pode ajudar a identificar locais seguros para habitação, mas também pode desempenhar um papel crucial em tarefas de construção e manutenção em futuras bases lunares. Assim, a exploração de cavernas na Lua e em Marte, facilitada por tecnologias como o ReachBot, representa um passo significativo rumo à expansão da presença humana no espaço.
O ReachBot, uma inovação promissora no campo da exploração robótica, teve sua origem como um projeto do programa NASA Innovative Advanced Concepts (NIAC), que se dedica ao desenvolvimento de tecnologias visionárias e de longo prazo. A principal motivação por trás do ReachBot é permitir a exploração robótica de ambientes planetários anteriormente inacessíveis, como tubos de lava, que podem oferecer descobertas científicas significativas e avanços tecnológicos.
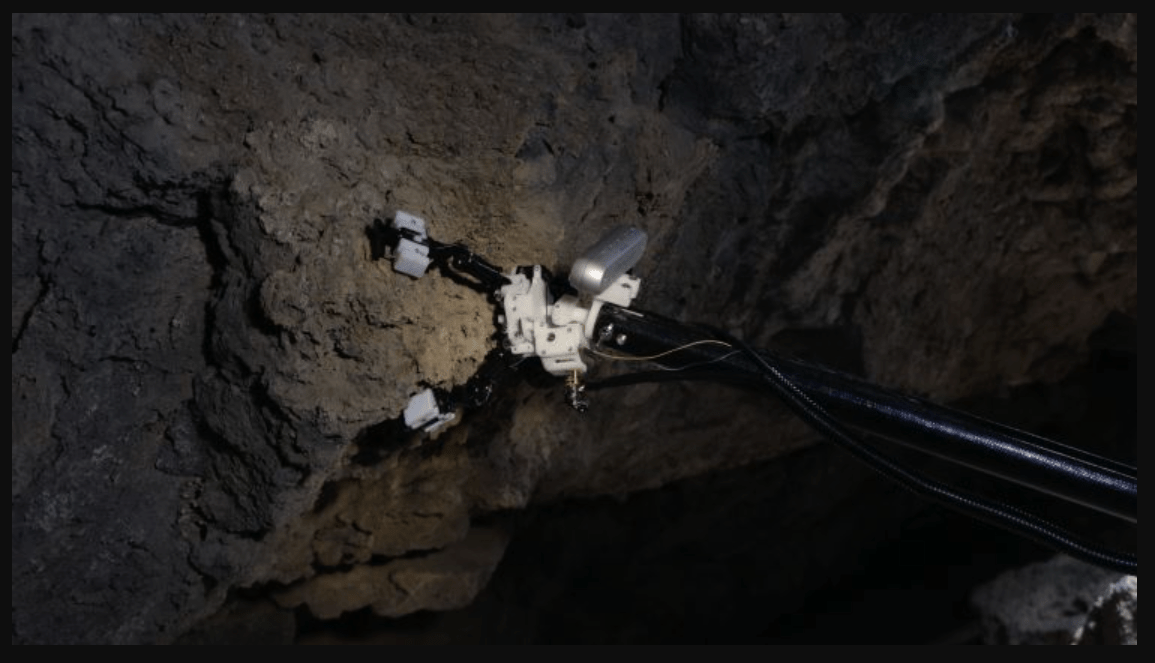
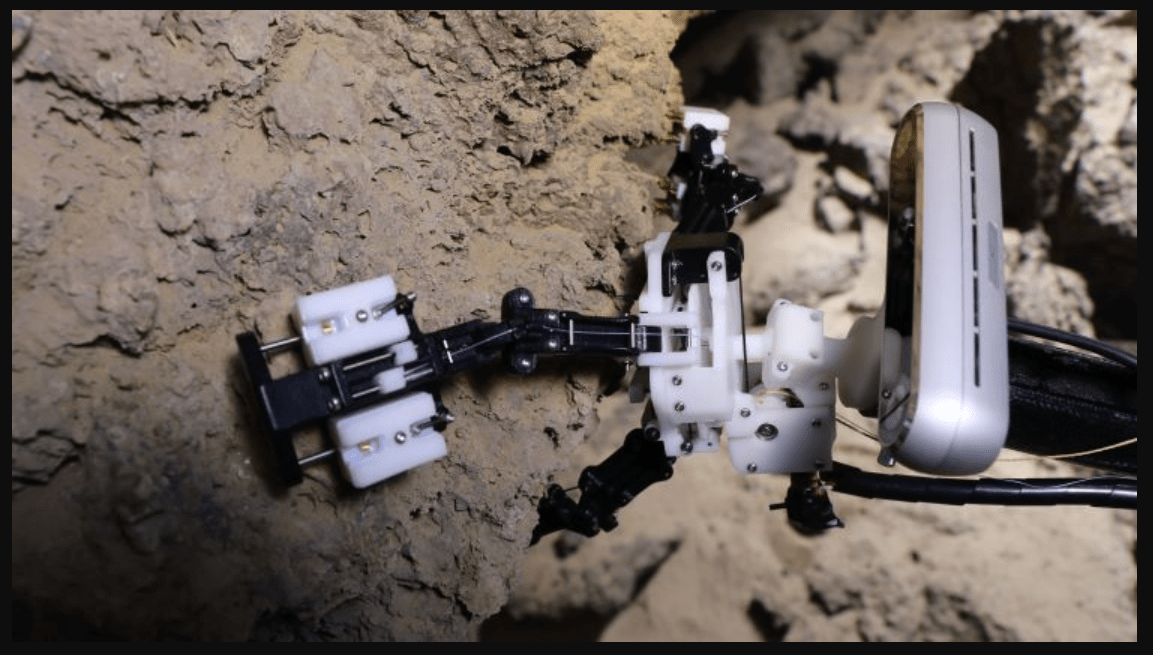
O que distingue o ReachBot de outros robôs exploradores é seu design mecânico único, que lhe confere uma capacidade excepcional de manobrar em terrenos difíceis, como superfícies rochosas irregulares. Equipado com apêndices alongados, pulsos pivotantes e garras, o ReachBot é guiado por uma série de algoritmos que determinam o melhor curso de ação para cada situação. Essa combinação de hardware e software permite que o robô contorça seu corpo de várias maneiras, facilitando a navegação em áreas confinadas, como tubos de lava e cavernas.
A trajetória de desenvolvimento do ReachBot inclui uma série de estudos e testes que visam aprimorar suas capacidades. Em 2021, um estudo inicial discutiu o conceito de utilização do ReachBot em tubos de lava marcianos, com Dr. Tony Chen como coautor. Este estudo foi seguido por testes de protótipos em 2022, onde Dr. Chen atuou como autor principal. As melhorias no protótipo continuaram ao longo de 2022, com Dr. Chen contribuindo como coautor em vários estudos subsequentes.
Esses estudos e testes foram cruciais para refinar o design do ReachBot e validar suas funcionalidades em ambientes análogos aos que seriam encontrados em Marte e na Lua. O robô foi submetido a uma série de avaliações rigorosas para testar sua capacidade de prever como iria agarrar e segurar superfícies rochosas, bem como para aperfeiçoar o design das garras e a identificação e seleção de locais de superfície rochosa. Através desses esforços, os pesquisadores conseguiram identificar uma ampla gama de extensões possíveis para o ReachBot, além de determinar que superfícies rochosas convexas (curvadas para fora) proporcionam uma aderência mais forte.
O desenvolvimento contínuo do ReachBot reflete um compromisso com a inovação e a exploração científica. Ao abordar os desafios técnicos e operacionais associados à exploração de ambientes subterrâneos em corpos celestes, o ReachBot representa um avanço significativo na robótica espacial. Com cada iteração e melhoria, o potencial do ReachBot para contribuir com missões futuras, como as do programa Artemis, se torna cada vez mais evidente, abrindo novas fronteiras para a exploração humana e robótica do nosso sistema solar.
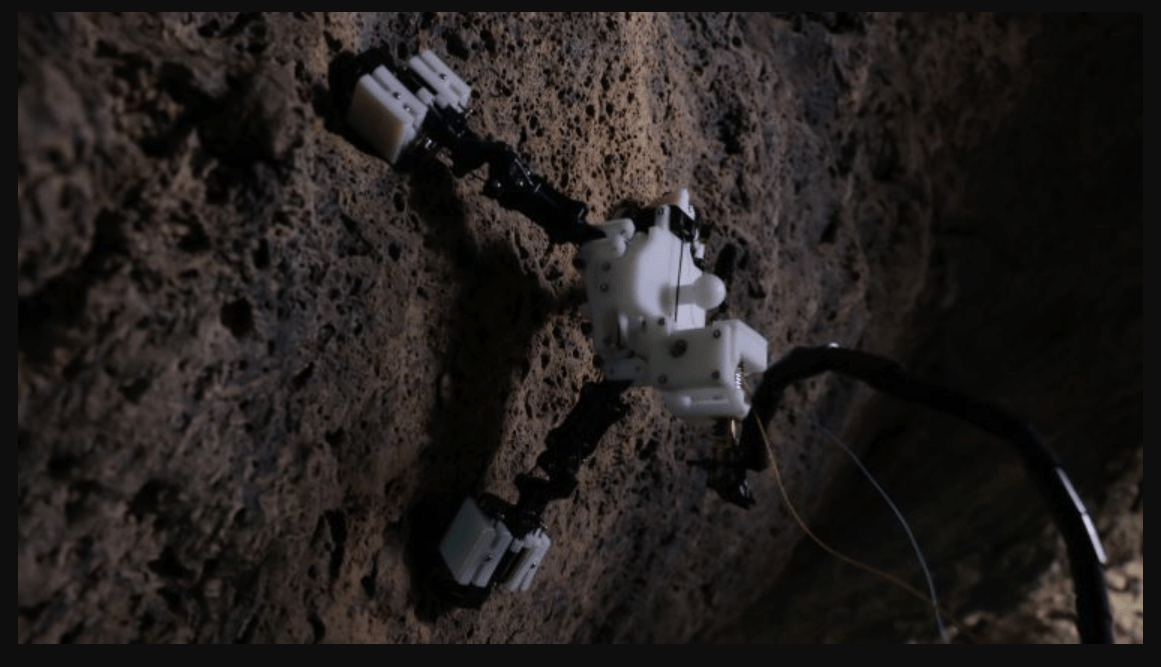
Os testes de campo do ReachBot foram conduzidos em um tubo de lava no campo vulcânico de Lavic Lake, localizado no Deserto de Mojave. Este local foi escolhido devido à sua semelhança com os tubos de lava que se acredita existirem em Marte, proporcionando um ambiente análogo realista para avaliar as capacidades do robô. A escolha do local foi estratégica, permitindo que os pesquisadores observassem como o ReachBot se comportaria em condições que simulam os desafios que enfrentaria em missões interplanetárias.
A metodologia dos testes envolveu várias etapas cruciais, começando com a previsão de como o ReachBot iria se agarrar e segurar superfícies rochosas irregulares. Este processo foi guiado por uma série de algoritmos avançados que permitiram ao robô determinar o melhor curso de ação para navegar em terrenos difíceis. O design das garras foi outro aspecto fundamental, com os pesquisadores focando em criar garras que pudessem se adaptar a diferentes formas e texturas de rochas, garantindo uma aderência firme e segura.
Além disso, a identificação e seleção de locais de superfície rochosa foram realizadas para entender melhor como o ReachBot poderia operar em ambientes confinados e variados. A capacidade do robô de estender seus apêndices e manobrar em espaços apertados foi testada extensivamente, demonstrando sua habilidade de contorcer seu corpo de maneiras diversas para superar obstáculos e explorar áreas de difícil acesso.
Os resultados dos testes foram promissores, revelando uma ampla gama de extensões possíveis para o ReachBot. Os pesquisadores descobriram que o robô tinha uma preferência por superfícies rochosas convexas, que proporcionavam uma aderência mais forte e segura. Esta descoberta é significativa, pois indica que o ReachBot pode ser otimizado para operar em terrenos específicos, maximizando sua eficiência e segurança durante missões de exploração.
Dr. Tony Chen, líder do estudo, destacou a importância dos testes no Deserto de Mojave, afirmando que o ambiente forneceu uma oportunidade valiosa para avaliar o desempenho do ReachBot em condições realistas. “Os tubos de lava no Deserto de Mojave foram escolhidos porque representam um sistema de cavernas análogo ao que poderíamos encontrar em Marte. Isso nos permitiu trazer um sistema parcial do ReachBot para este ambiente e investigar como os diversos subsistemas funcionam em um cenário realista”, explicou Dr. Chen.
Esses testes de campo são um passo crucial no desenvolvimento do ReachBot, fornecendo dados essenciais para futuras melhorias e refinamentos. Com base nos resultados obtidos, os pesquisadores podem continuar a aprimorar o design e as capacidades do robô, preparando-o para missões futuras na Lua e em Marte. A capacidade de explorar tubos de lava e cavernas com precisão e segurança pode abrir novas fronteiras para a exploração espacial, possibilitando descobertas científicas significativas e avanços tecnológicos.
A exploração de tubos de lava na Lua e em Marte tem sido um tópico de grande interesse para a comunidade científica, especialmente devido ao seu potencial para abrigar futuras missões humanas. Recentemente, um estudo liderado pela Universidade de Trento, na Itália, conseguiu mapear em 3D a entrada de um tubo de lava no Mare Tranquillitatis, na Lua, utilizando dados de radar obtidos pelo Lunar Reconnaissance Orbiter (LRO) da NASA. Este mapeamento revelou que o tubo de lava pode ter dezenas de metros de comprimento, com a abertura em si possuindo quase 100 metros de diâmetro. Tais estruturas subterrâneas poderiam fornecer um abrigo crucial contra a intensa radiação solar e cósmica que bombardeia a superfície lunar, abrindo assim novas possibilidades para a exploração humana de longo prazo.
Os tubos de lava, tanto na Lua quanto em Marte, oferecem uma proteção natural contra os perigos do ambiente espacial, incluindo a radiação prejudicial que pode causar efeitos biológicos adversos, como doenças por radiação, câncer e até a morte. A capacidade de enviar um explorador robótico, como o ReachBot, antes das missões tripuladas, poderia ajudar os cientistas e astronautas a identificar os tubos de lava mais adequados para servir como habitats seguros. Isso não apenas aumentaria a segurança das missões, mas também permitiria uma melhor preparação e planejamento para a construção de bases permanentes.
Além disso, a exploração desses tubos de lava pode revelar informações valiosas sobre a geologia e a história vulcânica da Lua e de Marte. A análise das rochas e formações dentro dessas cavernas pode fornecer insights sobre os processos geológicos que moldaram esses corpos celestes ao longo do tempo. Isso, por sua vez, pode ajudar a entender melhor a evolução do nosso próprio planeta e do sistema solar como um todo.
Embora os tubos de lava ainda não façam parte do programa Artemis da NASA, que visa retornar humanos à Lua, o ReachBot poderia desempenhar um papel significativo em futuras missões. O programa Artemis, que inclui a primeira mulher e a primeira pessoa de cor a pisar na superfície lunar, está focado inicialmente na exploração do polo sul lunar, onde se espera encontrar gelo de água nas regiões permanentemente sombreadas. No entanto, a inclusão de tubos de lava como possíveis locais de exploração e habitação poderia expandir significativamente os objetivos e capacidades das missões Artemis.
Em resumo, a exploração de tubos de lava na Lua e em Marte, facilitada por tecnologias inovadoras como o ReachBot, tem o potencial de transformar nossa abordagem à exploração espacial, proporcionando segurança, novos conhecimentos científicos e a possibilidade de missões humanas de longa duração. A relevância dessas estruturas subterrâneas não pode ser subestimada, e o desenvolvimento contínuo de tecnologias para explorá-las é essencial para o futuro da exploração espacial.
O desenvolvimento do ReachBot representa um avanço significativo na robótica espacial, mas ainda há muitos desafios a serem superados antes que ele possa ser utilizado em missões reais na Lua ou em Marte. Atualmente, apenas um protótipo parcial do ReachBot foi construído e testado em ambientes análogos, como os tubos de lava no Deserto de Mojave. Embora esses testes tenham demonstrado o potencial do robô, várias melhorias tecnológicas são necessárias para que ele possa operar de maneira eficaz em ambientes extraterrestres.
Um dos principais desafios é o desenvolvimento de booms espaciais retráteis que sejam mais adequados para a aplicação do ReachBot. Esses booms são essenciais para a mobilidade e a capacidade de manipulação do robô, permitindo que ele se estenda e se retraia conforme necessário para navegar em terrenos irregulares e confinados. A engenharia desses componentes deve garantir que eles sejam leves, duráveis e capazes de operar em condições extremas de temperatura e radiação encontradas na Lua e em Marte.
Além disso, é crucial desenvolver um protótipo completo do ReachBot que incorpore todos os subsistemas necessários para sua operação autônoma. Isso inclui sistemas de controle avançados, sensores de navegação e algoritmos de inteligência artificial que permitam ao robô tomar decisões em tempo real sobre como melhor se mover e interagir com o ambiente ao seu redor. Testes adicionais em ambientes análogos na Terra serão necessários para validar o desempenho do sistema completo e identificar quaisquer ajustes que possam ser necessários.
Outro aspecto importante é a realização de testes adicionais em ambientes relevantes. Embora os tubos de lava no Deserto de Mojave ofereçam um bom análogo para as condições que o ReachBot enfrentará em Marte, é essencial testar o robô em uma variedade de ambientes para garantir sua robustez e versatilidade. Isso pode incluir testes em câmaras de vácuo e em câmaras de simulação de radiação para replicar as condições encontradas no espaço.
O ReachBot também pode desempenhar um papel significativo no programa Artemis da NASA, que visa retornar humanos à Lua e estabelecer uma presença sustentável a longo prazo. Embora os tubos de lava não estejam atualmente no escopo das missões Artemis, o ReachBot poderia ser utilizado para explorar esses ambientes e fornecer dados cruciais sobre sua estrutura e habitabilidade. Além disso, suas capacidades de manipulação poderiam ser aproveitadas para tarefas de construção, como a montagem de habitats ou a instalação de equipamentos científicos.
Em resumo, enquanto o ReachBot já demonstrou um potencial considerável, ainda há um caminho a percorrer antes que ele possa ser implantado em missões lunares ou marcianas. O desenvolvimento contínuo de suas capacidades tecnológicas e a realização de testes rigorosos serão essenciais para garantir seu sucesso. Com esses avanços, o ReachBot poderá contribuir significativamente para a exploração de cavernas na Lua e em Marte, abrindo novas fronteiras para a ciência e a exploração espacial.
O desenvolvimento do ReachBot representa um avanço significativo nas capacidades de exploração robótica de ambientes subterrâneos em corpos celestes como a Lua e Marte. Com suas características únicas de design, incluindo apêndices alongados e pulsos pivotantes, o ReachBot é capaz de navegar por terrenos desafiadores que seriam inacessíveis para robôs tradicionais. Este robô inovador tem o potencial de transformar nossa abordagem à exploração espacial, permitindo a investigação de tubos de lava e cavernas que podem esconder segredos geológicos e astrobiológicos cruciais.
A capacidade do ReachBot de se adaptar a superfícies rochosas irregulares e sua habilidade de contorcer seu corpo para se mover através de espaços confinados são características que o tornam especialmente adequado para missões de exploração em ambientes extremos. Os testes de campo realizados no Deserto de Mojave demonstraram a eficácia do ReachBot em um análogo terrestre de tubos de lava marcianos, fornecendo uma base sólida para futuras missões espaciais.
Além de suas capacidades técnicas, o ReachBot também desempenha um papel vital na preparação para missões humanas de longo prazo na Lua e em Marte. A exploração de tubos de lava pode revelar locais que oferecem proteção natural contra a radiação solar e cósmica, um dos maiores desafios para a saúde dos astronautas em missões prolongadas. A identificação de tais locais é crucial para o estabelecimento de bases habitáveis e seguras, e o ReachBot pode fornecer os dados necessários para essa avaliação.
Apesar dos avanços promissores, ainda há desafios significativos a serem superados antes que o ReachBot possa ser plenamente implementado em missões espaciais. O desenvolvimento de booms espaciais retráteis mais adequados, a construção de um protótipo completo e testes adicionais em ambientes relevantes são passos essenciais para o progresso deste projeto. No entanto, o potencial impacto do ReachBot nas missões Artemis e em futuras explorações espaciais é inegável.
O programa Artemis da NASA, que visa retornar humanos à Lua e estabelecer uma presença sustentável, pode se beneficiar enormemente das capacidades do ReachBot. Embora a exploração de tubos de lava não esteja atualmente no escopo imediato das missões Artemis, a inclusão do ReachBot poderia abrir novas possibilidades para a exploração lunar, incluindo a construção de habitats em tubos de lava que oferecem proteção natural contra a radiação.
Em última análise, o ReachBot exemplifica a importância contínua da inovação e da ciência na exploração espacial. À medida que continuamos a expandir nossos horizontes e a explorar os mistérios do universo, tecnologias como o ReachBot serão fundamentais para superar os desafios e alcançar novas fronteiras. A ciência e a exploração espacial são empreendimentos que exigem perseverança, criatividade e colaboração, e o ReachBot é um testemunho do que podemos alcançar quando unimos esses esforços. Portanto, continuemos a fazer ciência e a olhar para o alto, em busca de novas descobertas e aventuras.


{kind=link}